Dit artikel, oorspronkelijk een voordracht gehouden naar aanleiding van de Showtech ’92 in Berlijn, wil een nieuwe vorm van aandrijftechniek nader toelichten, namelijk de elektromagnetische aandrijving waarbij microcomputers ingezet worden bij de sturing.
Op het gebied van aandrijvingssturing en –regeling maken de aanzienlijke ontwikkelingen bij de micro-elektronische bouwelementen grote vorderingen met name op het gebied van verbetering van de aandrijvingsdynamiek met verkleining van de hardware. Dat zou ertoe kunnen leiden dat de hoogwaardige veldgeoriënteerde sturings- en regelprocessen hun weg naar het theater zullen vinden.
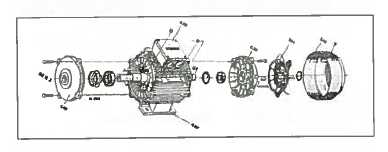 |
Fig 1: Opbouw van een draaistroom-asynchroonmotor |
Vergelijking
De computergestuurde aandrijvingen horen tot de groep servo-aandrijvingen. Dat waren tot een paar jaar geleden werktuigen die hoge eisen stelden aan de dynamiek, het regelgebied, het verloop van de momenten, de bouwgrootte en het gewicht. De prijsrelatie tussen een servo-aandrijvingspakket en een gelijkstroompakket lag op een factor 2. Dit beeld is ondertussen veranderd. De druk door wereldwijde concurrentie naar hogere productiviteit en kwaliteit verlangt steeds meer servo-aandrijvingen. Stijgende aantallen betekenen echter ook meer aanbieders, kortere innovatietijden en lagere prijzen. Servo-aandrijvingsoplossingen zijn tegen dezelfde prijs als gelijkstroomaandrijvingspakketten te verkrijgen.
Overzicht
‘Servo’ is van het Latijnse woord ‘servus’ afgeleid. Het wordt vrij vertaald met ‘bediende’. Het werd in de werktuigbouw ingevoerd omdat daar deze aandrijvingen over het algemeen een dergelijke taak vervulden. Tegenwoordig zijn de volgende aandrijvingen op de markt:
Eisen
Afhankelijk van de toepassing kan één van deze aandrijvingsoplossingen ingezet worden. Belangrijk daarbij is de prijs van het betreffende aandrijvingspakket. Maar voordat de vraag daarnaar gesteld kan worden, moet eerst aan andere eisen die aan aandrijFvingstechnieken in het theater gesteld worden, worden voldaan:
Als men bij alle bovengenoemde punten het optimale eist, met onderlinge afweging,, dan biedt de draaistroom-asynchroonmotor met veldgeoriënteerde regeling de meeste pluspunten. De firma Laier Bühnentechnik Hannover besloot daarom een dergelijke servo-motor , door hen dynamische aandrijving genoemd, in de toneeltechnische installatie van de nieuwbouw van het Schauspielhaus Hannover in te zetten, zowel voor de machines boven (trekkenwand) als onder (podia).
Eén nadeel mag hier niet worden verzwegen: dit aandrijvingsconcept is een factor 1,8 duurder dan een overeenkomstig gelijkstroompakket. Daartegenover staat dat zij het optimale biedt van de gestelde eisen.
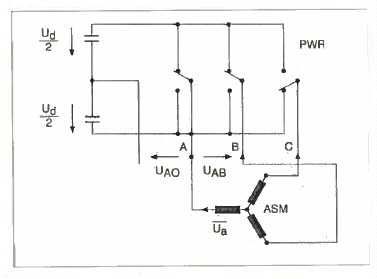 |
Fig 2: Vereenvoudigde weergave vvan een pulswisselrichter (PWR) met aangesloten synchroonmachine |
Dynamiek
De dynamische aandrijvingen vertonen dezelfde eigenschappen als de geregelde gelijkstroommachines. Op de volgende punten zijn ze echter een verbetering:
Tabel 1 toont een vergelijking van een gelijkstroommotor met een draaistroom-asynchroonmotor. Tabel 2 laat zien dat de asynchrone machine op de meeste punten voordelen vertoont.
|
Tabel 1 |
Gelijkstroommachine |
Dynamische draaistroomaandrijving |
|
Grootte |
112/2-M |
132 M/4 |
|
Nominaal vermogen |
8,0 kW |
7,5 kW |
|
Nominaal toerental |
1360 n/min |
1450 n/min |
|
Gewicht |
90 kg |
70 kg |
|
Rendement |
81% |
87% |
|
Traagheidsmoment |
0,04 kgm² |
0,0317 kgm² |
|
Beveiliging |
IP 23 |
IP 54 |
|
Tabel 2 |
Gelijkstroommachine |
Dynamische draaistroomaandrijving |
|
Regelgebied, toerental |
7-1500 dimensie |
0-1500 dimensie |
|
Regelgebied, snelheid |
0,6-120 cm/s |
0,08-120 cm/s |
|
Geluidsemissie |
70 dB(A) |
68 db(A) |
|
Duur stilstand |
20 |
onbegrensd |
|
cos phi net |
0,8 |
1,0 |
In fig. 1 wordt een eenvoudige opbouw van een draaistroom-asynchroonmotor afgebeeld. Er moet in het bijzonder gewezen worden op de enige verslijtbare onderdelen: twee kogellagers met een minimale standtijd van 20.000 uren, wat praktisch gezien betekent onderhoudsvrij is. Maar dit alles vormt eigenlijk slechts de inleiding van dit artikel. Het werkelijke thema is de omrichter voor de sturing van de motor.
Spanning
Bij de elektronische toerentalsturing van draaistroommotoren wordt onderscheid gemaakt tussen stoomgeleide omrichters, spanningsgeleide omrichters en pulsomrichters. In de vermogensklasse tot 75 kW heeft de pulsomrichter zich om economische en technische redenen doorgezet (fig. 2). De werking hiervan berust in principe op het gelijkrichten van de netvoedingswisselspanning die afgevlakt wordt met condensatoren. Deze tussengelijkspanning wordt dan in de zogenaamde puls-wisselrichter (PWR) door een driefasen brugschakeling weer zo in stukken gehakt dat er in de asynchroonmotor een vrijwel sinusvormig draaistroomsysteem ontstaat. De frequentie daarvan en dus ook het toerental van de moto kan door het stukhakken, in het vervolg puls-modulatie genoemd, over een groot gebied ingesteld en veranderd worden.
Modulatie
De puls-modulatie moet dus de drie-fasen brugschakeling precies zo sturen dat de stromen in de wikkelingen van de asynchroonmachine zich zodanig instellen dat de gewenste werking bereikt wordt, bijvoorbeeld een toerentalregeling of een regeling van het moment. De pulsmodulatie is een beslissende factor. De eigenschappen van het hele aandrijvingssysteem kunnen nooit beter zijn dan die van het modulatieproces.
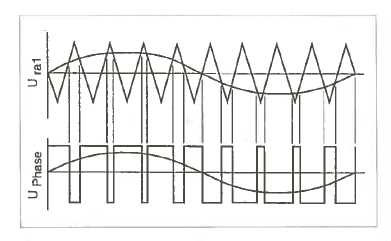 |
Fig 3: Pulsmodulatie volgens de ondergolven methode (driehoeksmodulatie) |
De werking van de puls-modulatie van een puls-wisselrichting kan vrij eenvoudig vertaald worden aan de hand van het proces van de zogenaamde ondergolven (ook driehoeksmodulatie genoemd) dat sinds lang bekend is en door Stemmler al in 1970 onderzocht werd. Fig. 3 laat bijvoorbeeld zien hoe uit de vergelijking van een driehoekshulpspanning met een sinusvormige referentiespanning een gepulsd spanningsverloop aan de klemmen van de machine ontstaat. Men kan gemakkelijk herkennen hoe frequentie en amplitude van de grondgolf via de frequentie en de amplitude van de referentiespanning doorgegeven wordt.
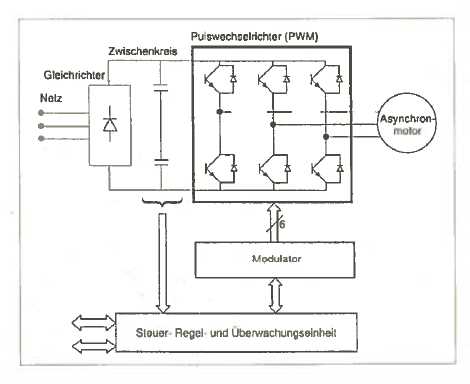 |
Fig 4: Blokschakelbeeld met frequentieomrichter |
Deze analoge modulatieprocessen en de toegepaste digitale kopieën proberen het spanningsverloop van elke fase apart te sturen. Het fysische werkingsmechanisme berust echter op elk moment op het samenspel van alle drie de fasen. Dit wordt in fig. 4 verduidelijkt. De motorkleppen A, B en C kunnen, onafhankelijk van hun polariteit, alleen maar met de positieve pool van de tussenkring verbonden zijn of met de negatieve pool. Hierbij ontstaat een vereenvoudigde voorstelling van een wisselschakelaar voor elke fase. De schakeltoestand van elke fase kan dan met + of – beschreven worden.
Praktijk
Een pulswisselrichting kan opgevat worden als een digitaal driefasen vermogensregelonderdeel. Voor de volledige beschrijving zijn 3 bit nodig. De driefasen pulswisselrichter heeft dus de beschikking over 23 = 8 verschillende schakeltoestanden. Zo blijkt dat als men de beschikking heeft over theoretische kennis over de asynchroonmachine en over computers die veel kunnen presteren, het namaken van een regelbaar draaistroomsysteem mogelijk wordt. Met de zogenaamde ruimtewijzer-modulatie beschikt men over een theorie die in de praktijk goede resultaten oplevert. De microcomputers die ons tegenwoordig ter beschikking maken het mogelijk deze theoretische kennis in de praktijk te gebruiken. Vooral kunnen door de bepaalde berekeningsroutines niet alleen de optimale schakeltoestanden berekend worden, maar er kan ook rekening gehouden worden met het werkelijke schakelgedrag van de pulswisselrichter. Verder staat na afloop van de interruptie- en berekeningroutine de resterende tijd ter beschikking voor sturings-, regel- en bewakingsfuncties.
Door de microcomputer kunnen ook meerdere parameters veranderd en aangepast worden aan de gevraagde aandrijvingstaak en met behulp van het ingeven van de parameters kunnen gegevens per taak makkelijk aangepast worden, zoals:
Bovendien kan de computer een display aansturen waarop de volgende informatie opgevraagd kan worden:
En, niet als laatste, is het daarmee ook mogelijk bij storingen fouten aan te geven en de daarbij behorende uitgangen via transistoren of relais te activeren. Uiteraard zijn de hier aangegeven mogelijkheden ook van invloed op de prijs, zoals gewoonlijk kosten ook hier de extra opties meer geld.
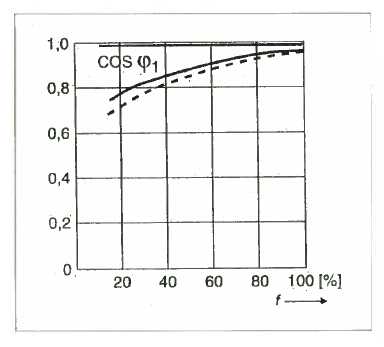 |
Fig 5: Net-vermogensfactor |
Voordeel
De mogelijkheid met computers een regelbaar draaistroomsysteem te vervaardigen, biedt bij de inzet van draaistroom-asynchroonmachines ten opzichte van een gelijkstroommotor meer dan de tot nu toe genoemde voordelen die vooral interessant zijn bij inzet in de toneeltechniek. Als eerste moet het toerental worden genoemd. Hier kan zonder problemen een gebied van 1:1500 bereikt worden wat een snelheid betekent van 0,8 mm/sec. tot 1,2 m /sec. In vergelijking met de gelijkstroommachine waarbij het kleinste snelheidsgebied 6 mm/sec is, lijkt het voordeel evident. Voorts is de duur van de stilstand belangrijk. Bij de gelijkstroommachine moet uitgegaan worden van max. 20 sec, terwijl bij de draaistroomasynchroonmachine de duur van de stilstand onbegrensd is. Verder kent het draaistroomsysteem nog een voordeel, namelijk de cos. phi van het net. Hier moet voor de gelijkstroommachine, afhankelijk van de last, 0,6-0,8 aangenomen worden. Bij de draaistroomasynchroonmachine is de cos. phi vrijwel 1,0 (fig. 5). Voor de AC-machine betekent dit veel minder kosten omdat er geen blindvermogen betaald hoeft te worden.
Voorschriften
Verder is in dit verband een korte beschouwing over de belangrijke terugwerkingen naar het net van belang. Omrichters beïnvloeden het net door hun niet-sinusvormige stroomopname. Hier moet onderschieiden worden of van het net afgenomen wordt via transistoren of thyristoren of diodengelijkrichters. Gelijkstroommachines worden meestal direct via thyristoren gevoed. We hebben in het begin de omrichters voor draaistroom-asynchroonmotoren genoemd, een gelijkspannings-tussen-kring met voeding via een diodenbrug. De cos. phi ligt bij de draaistroomomrichters nagenoeg bij 1,0, bij thyristoromrichters bij 0,6 tot 0,8. Maar nog beslissender is dat het transformatorvermogen bij thyristoromrichters berekend moet zijn op het schijnvermogen. Bovendien moeten er netspoelen gebruikt worden. Daarom moet het transformatorvermogen wezenlijk verhoogd worden.
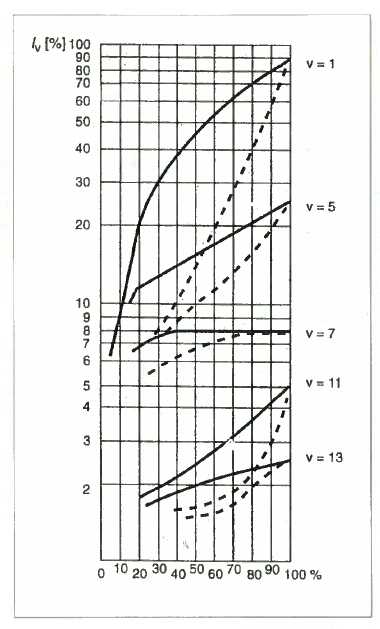 |
Fig 6: Netstroom bovengolven afhankelijk van de omrichterfrequentie in relatie tot de motorstroom op het nominale punt (50 Hz, resp. 60 Hz) |
Bij het gebruik van omrichters aan het net ontstaan behalve de grondgolfstromen ook bovengolfstromen met het 5-, 7-, 11- en 13-voudige van de netfrequentie (fig. 6). Bij het gebruik van thyristoromrichters is het aandeel van de boengolven zo groot dat bij grotere vermogens smoorspoelen ingezet moeten worden om aan de veiligheidsvoorschriften te voldoen. Buiten de problematiek van het gebruik van smoorspoelen bij grotere vermogens kunnen de kosten hiervoor niet verwaarloosd worden.
Bij transistoromrichters voor draaistroomaysnchroonmachines ontstaan ook bovengolven die, naar onze ervaring, ver onder de grenzen van de voorschriften liggen. Vanuit het gezichtspunt van de terugwerking op het net blijkt bij vergelijking van een gelijkstroommachine met een draaimotor aan de hand van het voorbeeld uit Hannover dat normale transformatoren een kortsluitingspanning hebben van 6% maar dat bij gelijkstroommachines met gebruik van thyristoromrichters echter trafo’s met een kortsluitspanning van 4% ingezet zouden moeten worden. Dit betekent dat er, om aan de voorschriften te voldoen, een spoel van 8% nodig is. Bij een nominaal benodigd vermogen van 700 kVA zou de trafo op 2.100 kVA berekend moeten zijn. De extra kosten daarvan zouden circa f. 22.000,- bedragen en de kosten voor het ter beschikking stellen van het vermogen circa f. 8.600,- per jaar.
Bij het inzetten van draaistroomaandrijvingen had de beoogde transformator van 800 kVA met 6% kortsluitspanning zonder problemen gebruikt kunnen worden zonder de voorgeschreven norm te overschrijden. Concreet betekent dit dat de investeringskosten voor de draaistroomaandrijvingen binnen 8 jaar afgeschreven zijn. Hierbij is er geen rekening mee gehouden dat gelijkstroommachines meer onderhoud vergen en dat de draaistroommachines de eerder genoemde voordelen vertonen. Verder is bij de AC-machines geen compensatie van de blindstroom nodig wat een verder reductie is van de afschrijvingstijd.
Kosten
Tot slot nog iets over de kosten, al blijkt uit de ervaring dat het moeilijk is daarover iets te zeggen omdat de gestelde eisen aan de aandrijving toch erg verschillend zijn. Bij de eenheidsprijs die ik u aansluitend noem gaat het om een 500 daN trek met laststang inclusief omrichter, schakelkast, installatie, voorzien van staalkabels en in bedrijf genomen. De sturing geschiedt via de zogenaamde havarie, dat wil zeggen vanuit een bedieningstafel maar zonder computerdeel. Hier kan door middel van een hefboom een uitgekozen trek op zicht bedient worden. Natuurlijk zijn alle veiligheidsmaatregelen zoals eindschakelaars en dergelijke, aanwezig.
Bij een dergelijke uitvoering met de hiervoor genoemde draaistroom-asynchroonmotor met veldgeoriënteerde regeling belopen de kosten per trek (bij een aantal van meer dan 20) circa f. 55.000,-. Hierin zijn ook geluiddempende maatregelen opgenomen. Voor de machine onder het toneel is het nog moeilijker prijzen te noemen. Ik beperk mij daarom tot de motor en omrichter, ingebouwd in een schakelkast. Hierbij moet met circa f. 88.000,- per aandrijving als pakket gerekend worden.
NB: Dit artikel verscheen eerder in de Bühnentechnische Rundschau, nr. 5, 1992 en werd vertaald door Henk Veenker.
Bedankt, binnen enkele minuten ontvangt je een e-mail van ons met daarin een persoonlijke link. Klik op de link om een nieuw wachtwoord op te geven.
